


定位系統在圖像處理上的應用
2012/8/29 15:48:14
一、 工作要求:
1、采用視覺系統對圖像進行檢測。:
1、采用視覺系統對圖像進行檢測。:
2、檢測范圍:
X , Y 的有效行程分別為500mm 和 400mm 。在 Y 軸下端裝配 視覺像機。
3、 工件形狀:
工件為電腦液晶顯示器,該顯示器有大有小,工作臺每次安裝10個顯示器,以備檢測。
4、 定位位精度及分辨率:
定位度為0.01mm
5、控制系統:
系統要求能夠對檢測數據要進行分析處理。
二、機器人組成:
該機器人由安裝架及顯示器工作臺、機器人定位系統、伺服驅動系統、末端檢測設備(相機)、控制系統等組成。
1、機器人定位系統
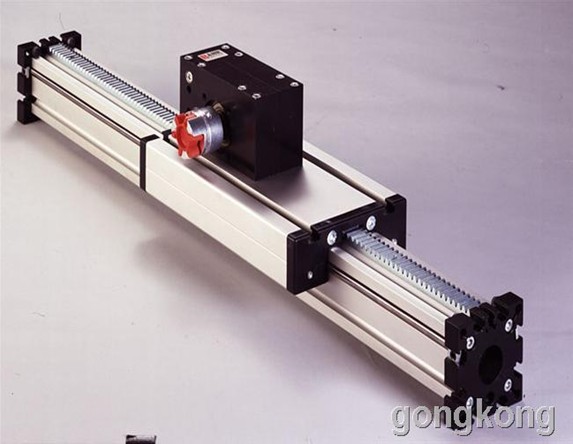
因為該結構要求的定位精度很高,用一般的傳動方式,如滾珠絲杠傳動,很難實現,我們選者了直線伺服電機定位單元。
X軸選用兩根DSM120定位單元。該定位系統的軌道是由兩排直線滾珠軌道組成的,軌道并排安裝在DS120定位型材的內底面兩側,直線電機的定子安裝在DS120定位型材內底面的中部,直線電機的動子安裝在DS120的滑塊上,滑塊與軌道安裝在一起,在軌道上運動。兩個電機分別由兩臺伺服驅動來驅動,由同一控制信號控制,保證嚴格的同步。
Y軸選用一根DSM120定位單元,為便于安裝負載,DSM120 滑塊安裝面與工作臺面垂直。負載直接安裝在該軸的滑塊上。
2、伺服驅動系統
直線伺服電機作為驅動已經與定位單元融為一體,不再需要其他的驅動。
3、視覺系統
該部分由光源、鏡頭等組成。功能是時時將圖像傳輸給控制中心。
4、控制系統
控制系統由大型PLC、觸摸屏組成。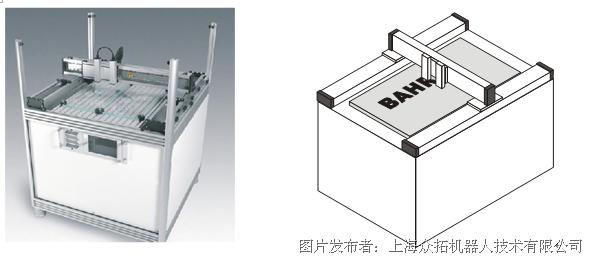




 投訴建議
投訴建議
提交
查看更多評論
其他資訊
德國BAHR 齒輪齒條定位系統

德國BAHR 防爆定位系統

德國BAHR 同步帶定位系統

上海眾拓 機床上下料機器人
上海眾拓 碼垛機器人